…or did she love me with torture?
Yeah, it’s that recurring theme again — the love of mine for a woman I’d spend more time with if I could afford the torture.
Afford?
Oh, indeed.
Today, I sat through several hours of people up on a dais dazzling me in a daze about their love and passion for philanthropy.
The only factor that kept me awake and alert during their entertainment of financial advisors, their clients and nonprofit organization representatives, other than seeing some familiar faces, was knowing that my reward for creating a derriere falling fast asleep would be getting Abi’s hands, wrists and elbows on me.
And boy, did she ever!
I’ve never been one of those sadomasochists who gets a certain thrill from pain.
Well…I mean, sure, I do get a certain thrill from pain but…is it getting hot in here?
Where was I?
Seriously, with my body supine and then prone, either way, Abi worked her magic on me.
That beautiful woman has a spell on me that I can’t describe.
I’m just glad she’s still in love with her man and I’ve got a steady woman of my own.
Otherwise…growl!
She is the only woman, and I mean the only one, not even my wife, who I would let touch me the way she does, working on knots in my back, neck and chest muscles that almost make this grown man cry.
I still don’t know if I’ve experienced the level of pain I’ve endured under the careful, delicate surgical procedure of Abi’s massage work.
I don’t know if I want to ever again.
Yet, somehow, I go back for more, letting the special love of my life have her way with me.
In those moments, alone on the massage table, my thoughts adrift on puffy clouds in a blue sky, just her and me in her flat, a crime drama on the tellie, her elbowing me while texting with clients for upcoming weekend massages at dance competitions, I ask myself how special is our love.
She doesn’t let me drive my elbows into her back or twist my fingers into her biceps.
She knows I love her even if I hate her when she’s sending me into Dante’s deepest levels of hellish pain.
For her, I would hunt animals, killing for meat bare-handed.
She has opened up my body for new experiences, giving me the happiness and courage I sought to feel confident on the dance floor, adding Jessica to the list of new dance wives.
Jenn, Abi, Jessica…and, of course, my wife…and Kelly…the list of fun dance partners grows. Is Naomi next? And, after her, who will look me in the eyes and want to have fun like there never was any fun before?
I was distracted most of the day today from work on the desktop robotic art sculpture that serves as a scale model for a yard art sculpture piece I’ve been slowly working on between daydreaming about the imaginary life this set of states of energy has convinced itself is real.
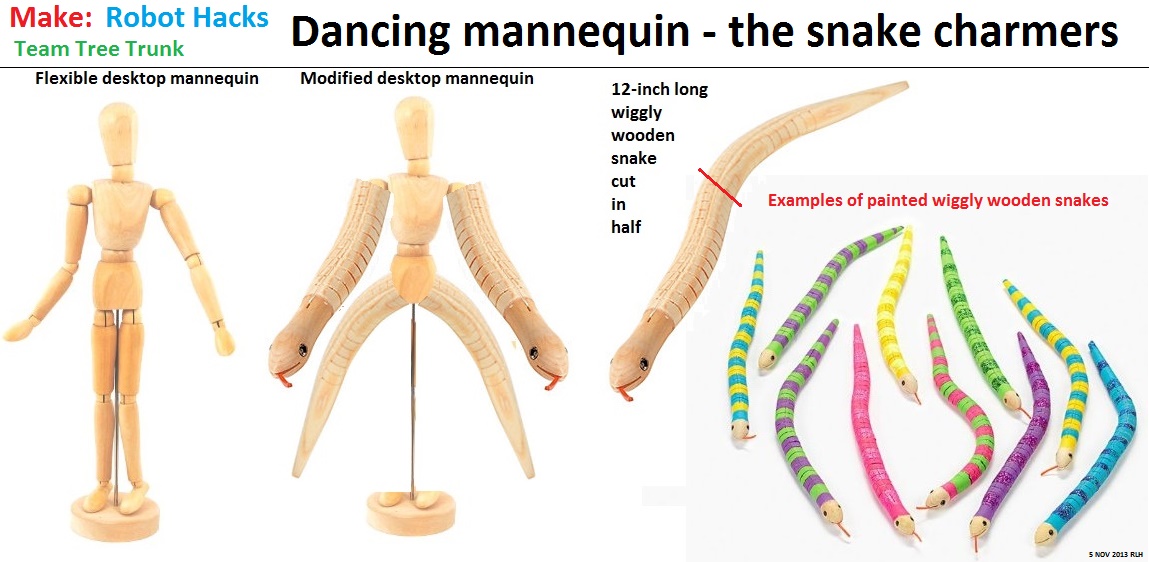
I returned this evening to program four LEDs and some sensors after working out the design details on dancing mannequins.
Abi, I’ll miss you desperately while you’re physically out of my life for the next two weeks. You torture me in so many ways I’ve got to add sadomasochist to the list of adjectives in front of my name, or does the acronym S&M get added afterward like “Esq,” “PhD” or “MD”?
Thank goodness, there’s Jenn still teaching dance lessons. And Naomi. And maybe even Jessica.
Jenn the mechanical/rocket propulsion engineer inspired me to create a robot. Abi the creative/artistic dance instructor/massage therapist inspired me to create robotic dancing mannequins. My wife the rocket test engineer inspired me to create dancing snake charmers. Naomi the hair stylist inspired me to colour my hair and let loose on the dance floor. Jessica has inspired me to have chaotic fun while remembering to dance the West Coast Swing style. And now Kelly has inspired me to see that not only can a person be a fiduciary advisor by day but dance “Sexual Healing” with a financial client at night and say it was good fun!
Thanks to the folks at Baron Bluff for hosting the philanthropy summit today; The Ledges for hosting Fred Lanier of JP Morgan who gave an economic seminar tonight on wealth management; Mandy at Club Rush.
I was happy to see the core group of Rocket Westies work out organizational problems tonight — without you guys, I wouldn’t be here right now.
And Jessica, darling, I’ll miss you, too, while you’re gone.
Now, time for some shuteye — I’m already a day behind on my coding but we’re a day ahead on our dancing mannequin design schedule!