Do I completely understand the role of electrochemical processes taking place between the atomic structures that fill the cavity between my ears and connect to the rest of the central nervous system of my body?
How many of the chemical structures can I readily recall their assigned labels and say that the photon bouncing across the back of my eyelid has anything to do with the impulse to press a tiny block of plastic which produces the letter I’m going to type next, carefully describing each changes of the states of energy between the photon hitting my eyeball and the letter that appears one after another on this screen?
How then can I understand where I’m going to take my robot design next?
First, I expose my eyes and ears to as much stimuli as possible, asking myself what in the environment, in this place and time, do I want to simulate on Mars decades later?
In other words, today I prototype with scale models of what I want to physically manifest using native materials on the Red Planet years/decades from now when who knows what kind of augmented reality we’ll give the first colonists to help them believe their senses are being so stimulated with variety that they won’t get homesick before the first generation of native-born Martians believes that life on Mars is rich and fulfilling enough as it is?
These questions trot across my memories and thoughts as I sit down to sketch out the design that I want our team to complete within three weeks using materials at hand, including the stuff I’ve bought (adding today’s purchase: another PIR sensor (Radio Shack product number 2760347) and two ultrasonic distance sensors (Parallax product number 28015-RT and Radio Shack product number 2760342)). and stuff that the folks at Maker gave our team.
While all of that boils in the cauldron of a cranium, I’ve got the love of dance and the love for friends floating in the mix, making my wife nervous that my thoughts are so clouded with constant processing that I’ve become a dangerous “tunnel vision” driver, the stereotypical absent-minded professor type who doesn’t see the light is red at the traffic intersection.
Every day, every hour is precious and the next three weeks will be challenge because I’ll both be without Abi in my life and missing dance lessons with her, let alone feeling her close by in my thoughts, and I’ll be without her which means I can focus on the robot design.
Aren’t most of us able to transfer some part of our physical attraction from one person to another?
I sure am.
So, last night, knowing that I’ll miss Abi more than I can ever tell her, I chose not to dance with her (or Jenn or Naomi or…) and gave my body love to women on the dance floor I’d never met before, losing myself in two-minute spans of time and hoping that I could be as good a dance partner for them as their eye-love requested, helping me transition my love for Abi from her to unknown women last night and then to my computer work today. I danced with my wife, too, of course; she mentioned I barely paid attention to her most of the evening, seeing that I danced with only a few women (quality instead of quantity, I always say) so it wasn’t that I ignored her, my monogamous partner, and spent all evening with other women; no, I was my usual alone-in-a-crowd meditative self preparing mentally for this day.
While sitting in a chair alone in my thoughts next to the dance floor determining how to take the new dance moves I saw advanced/all star and professional dancers showing off and incorporate them into my dancing, the design for the team’s robot started appearing to me in a foggy vision.
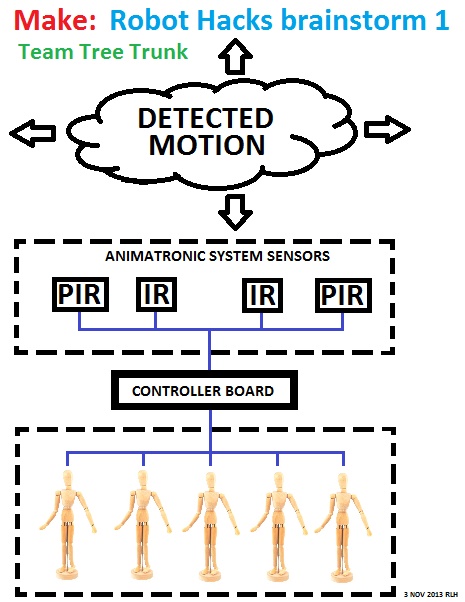
i wish I had a flatbed scanner in my laboratory study to quickly scan the engineering notebook drawing of my vision.
Here is an electronic paint version, instead:
More details tomorrow…
Let’s have fun!




