Recently, a local newspaper writer stood with his wife for a photograph showcasing Jay Leno wrapping his arms around them. Before that, he appeared on David Letterman’s show:
Tag Archives: mass media
My general practitioner agrees!
Who’s colder?
Who’s colder? You or Callan Gray on location after a snowfall? Julie’s ice crystal necklace has the answer.
Easy to do business with, the endless saga
Yesterday evening, I sat down in the Chan Auditorium on the campus of UAH (the University of Alabama in Huntsville) to listen to Frederiek Toney, Corporate Vice President and President, Global Ford Customer Service Division, alumnus of both UAH and Lee High School in Huntsville, Alabama.
Fred’s talk was interesting and underscored several topics of personal interest to me, which I’ll get to later on.
However, one point stood out more than the others: his emphasis on “you can’t manage a secret,” which he repeated more than once.
I agree wholeheartedly.
Ford, originally started in the United States of America, is a global competitor.
Should I be concerned about Ford’s electronics offering backdoor access to governmental agencies? Will car owners have to sign EULAs (end user licence agreements) that state something like the following:
READ THESE NOTICES CAREFULLY. IF YOU DO NOT AGREE TO ACCEPT THESE CONDITIONS, RETURN THE VEHICLE IN ORIGINAL PACKAGING WITH ALL OTHER ITEMS INCLUDED WITH THE VEHICLE TO THE PLACE OF PURCHASE AND YOUR MONEY WILL BE REFUNDED IN ACCORDANCE WITH THE APPLICABLE RETURN POLICY OF THE PLACE OF PURCHASE.
-
IMPORTANT NOTICE: As part of Ford’s quality assurance analysis, this vehicle automatically sends anonymous, non-personally identifiable system information to Ford (and/or other entities as volunteered for or required by law) upon first approach, when the vehicle attempts to connect to an electronic network such as the Internet, and periodically thereafter. It also automatically searches for updates for your vehicle. Personal information may be gathered, retrieved and sent in accordance with applicable laws in your jurisdiction at any place and any time. See details in the Ford End User Licence Agreement included with your vehicle.
The software products preinstalled in your vehicle are copyrighted products. Please carefully read all of the licence agreements furnished with each product because it may send anonymous/personal data not only to the product manufacturer but also to Ford and/or other entities as volunteered for or required by law.
Ford and its affiliates are not responsible for the accuracy and/or use of data stored or collected about your vehicle. Any and all disputes will be resolved through the mandatory and binding arbitration policy which went into effect the moment you expressed interest in this vehicle.
Rime of the anxious mare rhymer
Once on Performance Today
There was an enormous bouquet —
An aroma refreshing,
In a dome, uh, tea threshing —
Smells of Nerf ordinance, touché.
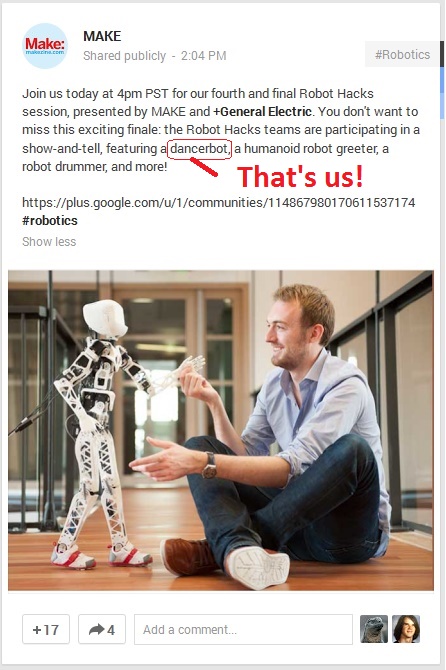
Pieces falling off your ‘bot lately?
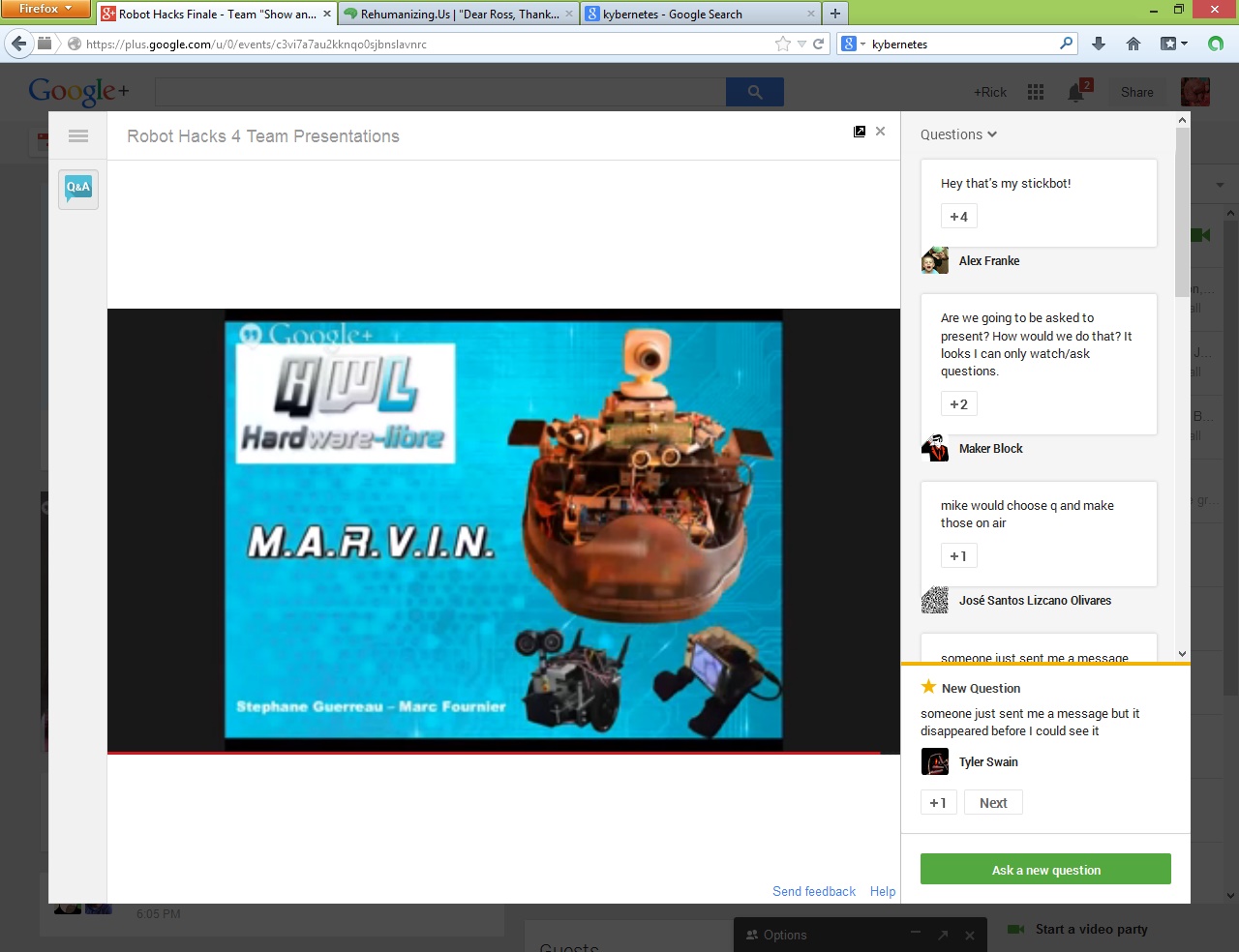
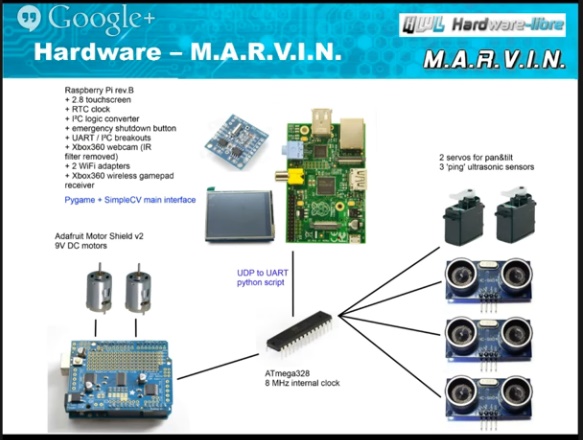
Cardboard, sentics, M.A.R.V.I.N., Pickle, drums, dancers, you name it, the robot has been named it and can do it.
What is “it”? It is life itself. The god in the machine.
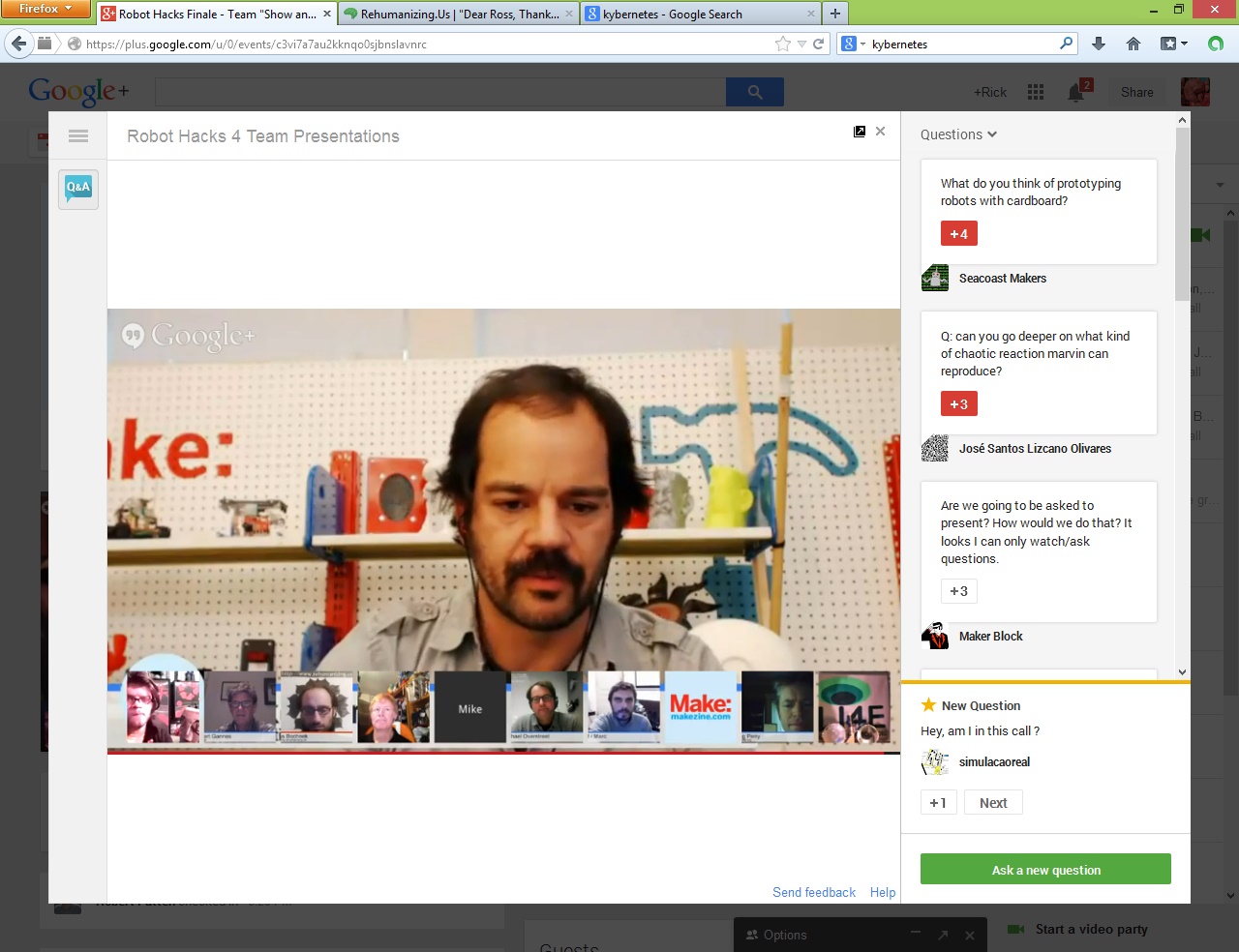
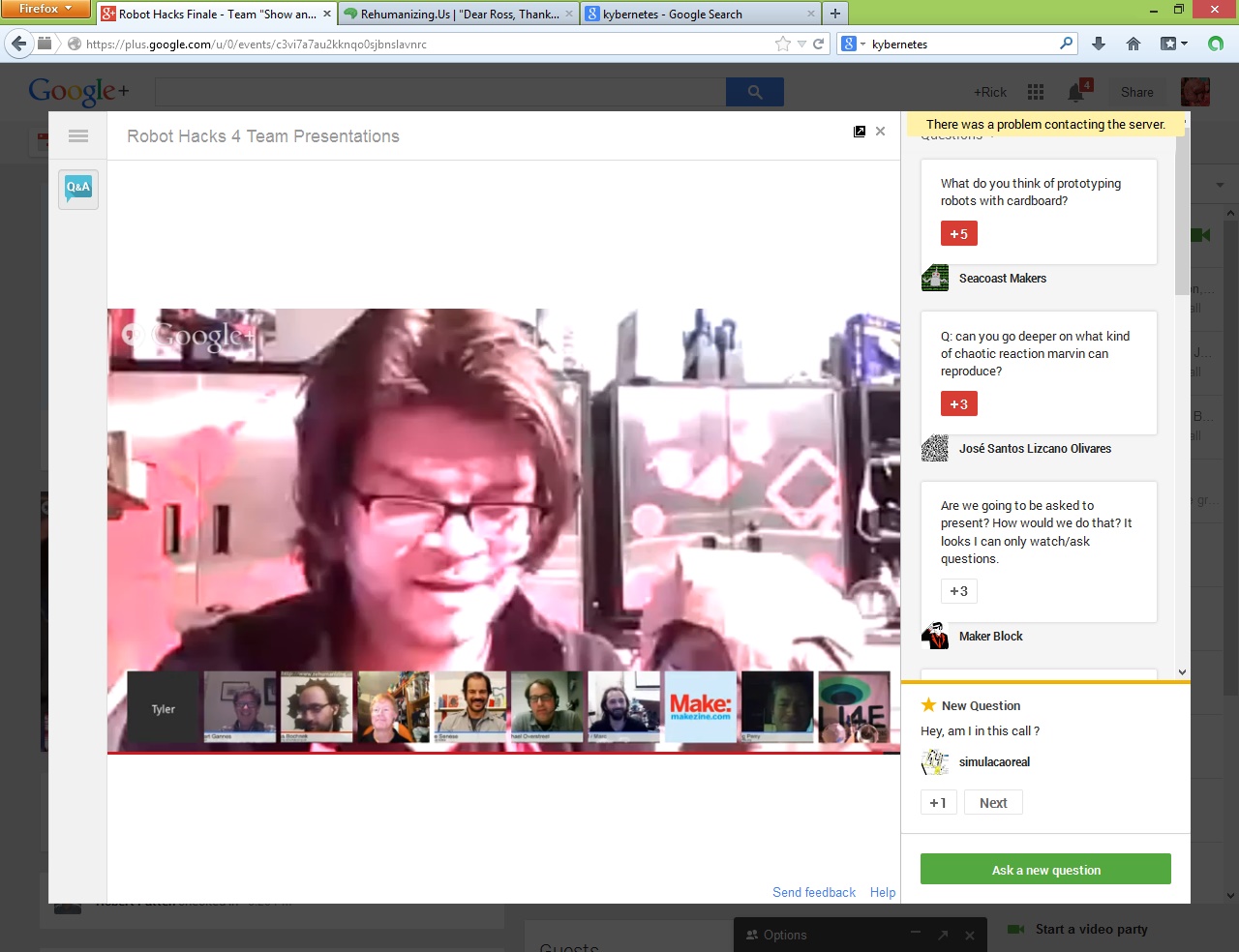
And that, folks, is what we’re doing here today at the Maker Session: Robot Hacks finale — showcasing a few of the dozens of great projects that were worked on the past 18 days.
Screenshots to wet your whistle while you work on your anthropomorphic dreams!:













Thanks again to the folks at MAKE and GE.
Two observations — one, we need to get young people more involved, and two, let’s hope those who started keep the excitement going onto even more ambitious projects!
The final version of the “storybook” for today’s presentation
Here’s the final version of the “storybook” (i.e., an open source computer program) that was downloaded into an Arduino microcontroller for presentation as a desktop art sculpture (a/k/a dancebot):
/* Desktop art sculpture by Team Tree Trunk, November 2013 (Rick Hill, Janeil Hill and Jennifer Nye (with influence by Abi Leggette)) Created in conjunction with the Robot Hacks event sponsored by MAKE magazine and GE, 3-20 November 2013. This project was inspired by the work of Erin Kennedy, aka RobotGrrl. Once upon a time, there were five photosensitive cells that wanted to play together. They were gathered inside a dark rectangular box when they felt a commotion. It was a two-eyed entity that called itself an ultrasonic sensor, telling the five photosensitive cells that ultrasonic sensors are like the bat or other creature that uses echolocation to describe its environment. The six of them looked up and saw the big shadow and shape of a giant that had lifted the lid of their box, exposing them to light, showing them a world they had never seen before, full of odd shapes and more entities just like themselves. The giant removed them from the box and attached their legs into holes that connected to rows of entities already in place, with names like resistor, wire, LED and a complicated entity called the Arduino. The giant then played with them and gave them power. They were more alive than ever before! Excitedly, they joined with the wires, resistors, LEDs and Arduino to move one-armed objects called servos. Eventually, they left the rows of holes and were glued together with metal to form a new network of connections inside a cylindrical box. The giant told them they were going to become a desktop art sculpture, a Cubist version of a robot, dissected into its separate parts and put on display like a Damien Hirst cadaver. He walked them through a strange language, based on the idea of logic, that made them more than the sum of their parts... Five LDRs/photocells and one ultrasonic sensor are pointed outward in the circular side wall of a hat box. Each photocell controls the movement of a small analog servo attached to the lid of the hat box. The ultrasonic sensor controls the movement of large analog servo attached to the lid of the hat box, which in turn is connected to a set of pulleys. If the distance from an object to the ultrasonic sensor is less than 5, then all of the servos are returned to their original "zero" position; otherwise they rotate based on readings from the photocells and ultrasonic sensor. */ int photocellPin0 = 0; // the first photocell is connected to Arduino pin a0 int photocellPin1 = 1; // the second photocell is connected to Arduino pin a1 int photocellPin2 = 2; // the third photocell is connected to Arduino pin a2 int photocellPin3 = 3; // the fourth photocell is connected to Arduino pin a3 int photocellPin4 = 4; // the fifth photocell is connected to Arduino pin a4 int photocellReading; // this is what we call the analog reading from the sensor int yourDistance; // this is what we call the analog reading from the ultrasonic sensor int servoPosition; // this is what we call the servo position between 0 and 180 degrees on a compass #include <Servo.h> // add a virtual library book called Servo.h for reference // by the logical sentences in this storybook Servo myservo0; // create servo object to control a servo on Arduino pin D3 Servo myservo1; // create servo object to control a servo on Arduino pin D5 Servo myservo2; // create servo object to control a servo on Arduino pin D6 Servo myservo3; // create servo object to control a servo on Arduino pin D9 Servo myservo4; // create servo object to control a servo on Arduino pin D10 Servo myservo5; // create servo object to control a servo on Arduino pin D11 const int pingPin = 2; // tells the logical sentences that the ultrasonic sensor // is connected to Arduino pin D2 // NOTE: anything that starts with a "/*" and ends with a "*/" is to be ignored /* const int closeD = 10; // cm; maximum closest distance - 0 to 10 cm range const int midD = 20; // cm; maximum hand distance - 10 to 20 cm range const int farD = 30; // cm; maximum farthest distance - 20 to 30 cm range */ int pos = 0; // variable to store the servo position */ void setup(void) { myservo0.attach(3); // attaches the servo 0 on pin 3 to the servo object myservo1.attach(5); // attaches the servo 1 on pin 5 to the servo object myservo2.attach(6); // attaches the servo 2 on pin 6 to the servo object myservo3.attach(9); // attaches the servo 3 on pin 9 to the servo object myservo4.attach(10); // attaches the servo 4 on pin 10 to the servo object myservo5.attach(11); // attaches the servo 5 on pin 11 to the servo object // We'll send debugging information via the Serial monitor Serial.begin(9600); } // This is the part of the logic that keeps the sensors and servo alive void loop(void) { // get the ultrasonic sensor raw distance in centimetres yourDistance = getDistance(pingPin); // limit the reading from 0 to 50, ignoring smaller or larger numbers yourDistance = constrain(yourDistance, 0, 50); // adjust the servo position (0 to 180 degrees) to match the ultrasonic readings (0 to 50) servoPosition = map(yourDistance, 0, 50, 0, 180); // tell the servo to move to the reading that was just called servoPosition myservo5.write(servoPosition); // here's where all the servos are moved to their zero -0- position if // the distance from an object to the ultrasonic sensor is less than five -5- if (yourDistance < 5) { myservo0.write(0); myservo1.write(0); myservo2.write(0); myservo3.write(0); myservo4.write(0); } // if the distance from an object to the ultrasonic sensor is five -5- or more // then we do something else; // in this case, as shown below, we record what the photocells are reading else { // we repeat this set of logical sentences five times //Repetition Number One // get the photocell sensor raw reading photocellReading = analogRead(photocellPin0); Serial.print("Analog reading 0 = "); // send the phrase in quotes to the serial port Serial.println(photocellReading); // send the raw analog reading to the serial port // limit the reading from 0 to 300, ignoring smaller or larger numbers photocellReading = constrain(photocellReading, 0, 300); // adjust the servo position (0 to 180 degrees) to match the ultrasonic readings (0 to 300) servoPosition = map(photocellReading, 0, 300, 0, 180); myservo0.write(servoPosition); //Repetition Number Two photocellReading = analogRead(photocellPin1); Serial.print("Analog reading 1 = "); Serial.println(photocellReading); // the raw analog reading photocellReading = constrain(photocellReading, 0, 300); servoPosition = map(photocellReading, 0, 300, 0, 180); myservo1.write(servoPosition); //Repetition Number Three photocellReading = analogRead(photocellPin2); Serial.print("Analog reading 2 = "); Serial.println(photocellReading); // the raw analog reading photocellReading = constrain(photocellReading, 0, 300); servoPosition = map(photocellReading, 0, 300, 0, 180); myservo2.write(servoPosition); //Repetition Number Four photocellReading = analogRead(photocellPin3); Serial.print("Analog reading 3 = "); Serial.println(photocellReading); // the raw analog reading photocellReading = constrain(photocellReading, 0, 300); servoPosition = map(photocellReading, 0, 300, 0, 180); myservo3.write(servoPosition); //Repetition Number Five photocellReading = analogRead(photocellPin4); Serial.print("Analog reading 4 = "); Serial.println(photocellReading); // the raw analog reading photocellReading = constrain(photocellReading, 0, 300); servoPosition = map(photocellReading, 0, 300, 0, 180); myservo4.write(servoPosition); } delay(300); // wait about three tenths of a second to repeat everything in the loop } // NOTE: anything that starts with a "/*" and ends with a "*/" is to be ignored /* boolean ping(int pingPin) //boolean ping(int pingPin, int ledPin1, int ledPin2, int ledPin3) { int d = getDistance(pingPin); // cm boolean pinActivated1 = false; boolean pinActivated2 = false; boolean pinActivated3 = false; if (d < closeD) { digitalWrite(ledPin1, HIGH); digitalWrite(ledPin2, LOW); digitalWrite(ledPin3, LOW); myservo5.write(180); pinActivated1 = true; pinActivated2 = false; pinActivated3 = false; } else { if (d < midD) { digitalWrite(ledPin1, LOW); digitalWrite(ledPin2, HIGH); digitalWrite(ledPin3, LOW); myservo5.write(90); pinActivated1 = false; pinActivated2 = true; pinActivated3 = false; } else { digitalWrite(ledPin1, LOW); digitalWrite(ledPin2, LOW); digitalWrite(ledPin3, HIGH); myservo5.write(0); pinActivated1 = false; pinActivated2 = false; pinActivated3 = true; } } // return pinActivated1, pinActivated2, pinActivated3; return pingPin; } */ // This part of the logical sentences tells the ultrasonic sensor what to say. int getDistance(int pingPin) { long duration, inches, cm; pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(5); digitalWrite(pingPin, LOW); pinMode(pingPin, INPUT); duration = pulseIn(pingPin, HIGH); inches = microsecondsToInches(duration); cm = microsecondsToCentimeters(duration); Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); return(cm); // You could also return inches } long microsecondsToInches(long microseconds) { return microseconds / 74 / 2; } long microsecondsToCentimeters(long microseconds) { return microseconds / 29 / 2; } /*******************************************************************************/ // This is free software; you can redistribute it and/or // modify it under the terms of the GNU Lesser General Public // License as published by the Free Software Foundation; either // version 2.1 of the License, or (at your option) any later version. // // This is distributed in the hope that it will be useful, // but WITHOUT ANY WARRANTY; without even the implied warranty of // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU // Lesser General Public License for more details. // // You could have received a copy of the GNU Lesser General Public // License along with this code; if not, write to the Free Software // Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA // /*******************************************************************************/
Fun in the Interwebs
The magic number
Six times three is eighteen:

Film analysis du jour
I know I’m surely not the first to notice this but after watching the first few minutes of the film, “Poltergeist,” on the tellie while taking a lunch break, it occurred to me that the whole film might just be an allegory about the side/after effects on young children of recreational drug use by parents in the home.
